분기한정법(Branch and Bound)은 최적화 문제를 해결하기 위한 효율적인 알고리즘 설계 패러다임이다. 이 방법은 거대한, 때로는 지수적으로 큰 해공간을 체계적으로 탐색하면서 최적해를 찾아내는 강력한 기법이다.
분기한정법은 다양한 최적화 문제를 해결하기 위한 강력하고 유연한 알고리즘 패러다임이다. 이 방법의 핵심은 문제를 체계적으로 나누고, 각 하위 문제의 한계값을 계산하여 유망하지 않은 경로를 가지치기함으로써 탐색 공간을 효과적으로 줄이는 데 있다.
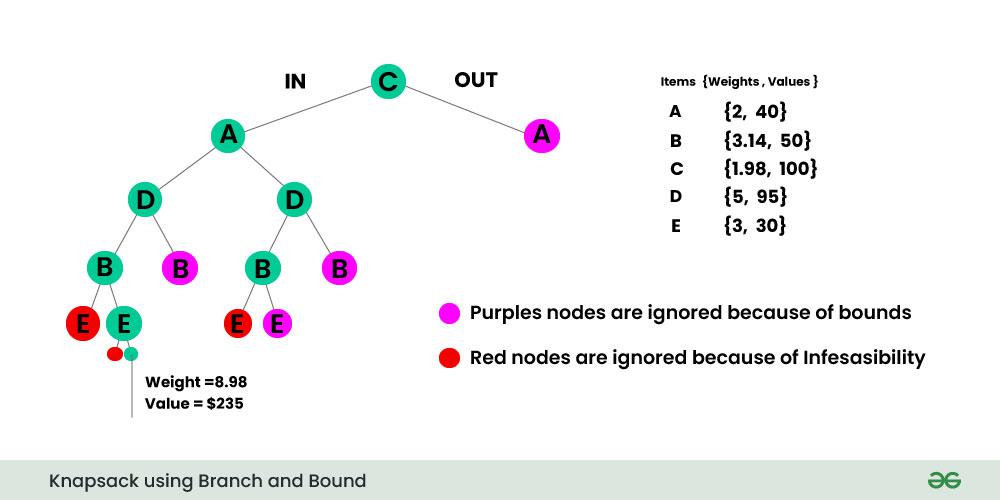
분기한정법은 외판원 문제, 배낭 문제, 작업 할당 문제 등 다양한 NP-hard 최적화 문제에 성공적으로 적용되어 왔다. 물론 최악의 경우에는 여전히 지수 시간이 필요하지만, 효과적인 한계 함수와 가지치기 전략을 통해 실용적인 시간 내에 최적해 또는 근사 최적해를 찾을 수 있다.
현대 컴퓨팅 환경에서는 병렬 처리, 분산 컴퓨팅, 그리고 머신 러닝과 같은 기술의 발전에 힘입어 분기한정법의 활용 범위가 더욱 확장되고 있다. 이러한 발전은 더 큰 규모의 실제 문제를 효율적으로 해결할 수 있는 가능성을 열어주고 있다.
defknapsack_branch_and_bound(weights,values,capacity,index=0,current_weight=0,current_value=0,best_value=0):# 기저 조건: 모든 아이템을 고려했거나 용량을 초과한 경우ifindex==len(weights)orcurrent_weight>capacity:returnbest_value# 현재 아이템을 선택하지 않는 경우best_value=knapsack_branch_and_bound(weights,values,capacity,index+1,current_weight,current_value,best_value)# 현재 아이템을 선택하는 경우ifcurrent_weight+weights[index]<=capacity:new_value=current_value+values[index]ifnew_value>best_value:best_value=new_valuebest_value=knapsack_branch_and_bound(weights,values,capacity,index+1,current_weight+weights[index],new_value,best_value)returnbest_value# 사용 예시weights=[10,20,30]values=[60,100,120]capacity=50result=knapsack_branch_and_bound(weights,values,capacity)print(f"최대 가치: {result}")
importheapqdefknapsack_branch_and_bound_queue(values,weights,capacity):n=len(values)# 가치/무게 비율에 따라 물건 정렬items=[(values[i],weights[i],i)foriinrange(n)]items.sort(key=lambdax:x[0]/x[1],reverse=True)# 최적해를 저장할 변수들best_value=0best_solution=[0]*n# 상한값 계산 함수defbound(k,current_weight,current_value):# (앞의 예제와 동일)ifcurrent_weight>=capacity:return0bound_value=current_valuetotal_weight=current_weightidx=kwhileidx<nandtotal_weight+items[idx][1]<=capacity:bound_value+=items[idx][0]total_weight+=items[idx][1]idx+=1ifidx<n:bound_value+=(capacity-total_weight)*(items[idx][0]/items[idx][1])returnbound_value# 초기 노드 생성# (노드 형식: (-상한값, 물건 인덱스, 현재 무게, 현재 가치, 선택 상태))# 우선순위 큐에서 최대 상한값을 가진 노드를 먼저 처리하기 위해 상한값에 음수 부호를 사용bound_value=bound(0,0,0)priority_queue=[(-bound_value,0,0,0,[0]*n)]heapq.heapify(priority_queue)whilepriority_queue:# 최대 상한값을 가진 노드 추출_,k,current_weight,current_value,solution=heapq.heappop(priority_queue)# 가지치기: 상한값이 현재 최적해보다 작거나 같으면 탐색 중단if-_<=best_value:continue# 모든 물건을 고려했을 때ifk==n:ifcurrent_value>best_value:best_value=current_valuebest_solution=solution[:]continue# 현재 물건 정보item_value,item_weight,original_index=items[k]# 현재 물건을 선택하는 경우 (왼쪽 분기)ifcurrent_weight+item_weight<=capacity:new_solution=solution[:]new_solution[original_index]=1new_value=current_value+item_valuenew_weight=current_weight+item_weightbound_value=bound(k+1,new_weight,new_value)# 가지치기 전에 상한값 확인ifbound_value>best_value:heapq.heappush(priority_queue,(-bound_value,k+1,new_weight,new_value,new_solution))# 현재 물건을 선택하지 않는 경우 (오른쪽 분기)new_solution=solution[:]new_solution[original_index]=0bound_value=bound(k+1,current_weight,current_value)# 가지치기 전에 상한값 확인ifbound_value>best_value:heapq.heappush(priority_queue,(-bound_value,k+1,current_weight,current_value,new_solution))returnbest_value,best_solution
이 구현에서는 우선순위 큐를 사용하여 항상 가장 유망한(상한값이 높은) 노드를 먼저 탐색한다.
defsolve_tsp(distance_matrix):n=len(distance_matrix)classNode:def__init__(self,path,cost,bound):self.path=path# 현재까지의 경로self.cost=cost# 현재까지의 비용self.bound=bound# 하한 값def__lt__(self,other):returnself.bound<other.bounddefcompute_bound(node):# 하한값 계산: 현재 비용 + 각 미방문 도시에서의 최소 비용iflen(node.path)==n:# 모든 도시 방문 완료returnnode.cost+distance_matrix[node.path[-1]][node.path[0]]bound=node.costvisited=set(node.path)current_city=node.path[-1]# 각 미방문 도시에 대해 최소 비용 간선 추가foriinrange(n):ifinotinvisited:min_edge=float('inf')forjinrange(n):ifj!=iandjnotinvisited:min_edge=min(min_edge,distance_matrix[i][j])bound+=min_edgereturnbound# 시작 노드 (0번 도시부터 시작)start_node=Node([0],0,0)start_node.bound=compute_bound(start_node)queue=PriorityQueue()queue.put(start_node)best_tour=Nonebest_cost=float('inf')whilenotqueue.empty():node=queue.get()ifnode.bound>=best_cost:continueiflen(node.path)==n:# 모든 도시 방문# 출발점으로 돌아가는 비용 추가total_cost=node.cost+distance_matrix[node.path[-1]][node.path[0]]iftotal_cost<best_cost:best_cost=total_costbest_tour=node.path+[node.path[0]]else:current_city=node.path[-1]fornext_cityinrange(n):ifnext_citynotinnode.path:new_path=node.path+[next_city]new_cost=node.cost+distance_matrix[current_city][next_city]new_node=Node(new_path,new_cost,0)new_node.bound=compute_bound(new_node)ifnew_node.bound<best_cost:queue.put(new_node)returnbest_tour,best_cost
defsolve_knapsack(values,weights,capacity):n=len(values)classNode:def__init__(self,level,value,weight,bound):self.level=level# 현재 고려 중인 아이템 레벨self.value=value# 현재까지의 가치self.weight=weight# 현재까지의 무게self.bound=bound# 상한 값def__lt__(self,other):returnself.bound>other.bound# 최대화 문제이므로 내림차순defcompute_bound(node):# 이미 무게 제한 초과시 유효하지 않음ifnode.weight>capacity:return0# 현재까지의 가치를 기준값으로 설정bound=node.valuej=node.leveltotal_weight=node.weight# 남은 아이템을 가치/무게 비율이 높은 순서대로 추가whilej<nandtotal_weight+weights[j]<=capacity:bound+=values[j]total_weight+=weights[j]j+=1# 마지막 아이템은 비율에 따라 부분적으로 추가ifj<n:bound+=(capacity-total_weight)*(values[j]/weights[j])returnbound# 가치/무게 비율에 따라 아이템 정렬items=[(values[i],weights[i],i)foriinrange(n)]items.sort(key=lambdax:x[0]/x[1],reverse=True)# 정렬된 순서에 맞게 값 재배치sorted_values=[item[0]foriteminitems]sorted_weights=[item[1]foriteminitems]# 시작 노드start_node=Node(0,0,0,0)start_node.bound=compute_bound(start_node)queue=PriorityQueue()queue.put(start_node)best_value=0best_solution=[]whilenotqueue.empty():node=queue.get()ifnode.bound<=best_value:continue# 모든 아이템 고려 완료ifnode.level==n:ifnode.value>best_value:best_value=node.valuebest_solution=[items[i][2]foriinrange(n)ifnode.included[i]]else:# 현재 아이템을 포함하는 경우include_weight=node.weight+sorted_weights[node.level]ifinclude_weight<=capacity:include_node=Node(node.level+1,node.value+sorted_values[node.level],include_weight,0)include_node.included=node.included+[True]include_node.bound=compute_bound(include_node)ifinclude_node.bound>best_value:queue.put(include_node)# 현재 아이템을 포함하지 않는 경우exclude_node=Node(node.level+1,node.value,node.weight,0)exclude_node.included=node.included+[False]exclude_node.bound=compute_bound(exclude_node)ifexclude_node.bound>best_value:queue.put(exclude_node)returnbest_value,best_solution
defsolve_assignment(cost_matrix):n=len(cost_matrix)classNode:def__init__(self,level,assignments,cost,bound):self.level=level# 현재 할당 중인 작업자self.assignments=assignments# 현재까지의 할당 상태self.cost=cost# 현재까지의 비용self.bound=bound# 하한 값def__lt__(self,other):returnself.bound<other.bounddefcompute_bound(node):# 현재까지의 비용을 기준값으로 설정bound=node.cost# 각 미할당 작업에 대해 최소 비용 추가assigned_tasks=set(node.assignments)foriinrange(node.level,n):min_cost=float('inf')forjinrange(n):ifjnotinassigned_tasks:min_cost=min(min_cost,cost_matrix[i][j])bound+=min_costreturnbound# 시작 노드start_node=Node(0,[],0,0)start_node.bound=compute_bound(start_node)queue=PriorityQueue()queue.put(start_node)best_assignment=Nonebest_cost=float('inf')whilenotqueue.empty():node=queue.get()ifnode.bound>=best_cost:continue# 모든 작업자에게 할당 완료ifnode.level==n:ifnode.cost<best_cost:best_cost=node.costbest_assignment=node.assignments.copy()else:# 현재 작업자에게 각 미할당 작업 할당 시도assigned_tasks=set(node.assignments)fortaskinrange(n):iftasknotinassigned_tasks:new_assignments=node.assignments+[task]new_cost=node.cost+cost_matrix[node.level][task]new_node=Node(node.level+1,new_assignments,new_cost,0)new_node.bound=compute_bound(new_node)ifnew_node.bound<best_cost:queue.put(new_node)returnbest_assignment,best_cost
Back Tracking vs. Branch and Bound 백트래킹(Backtracking)과 분기한정법(Branch and Bound)은 조합 최적화 문제를 해결하기 위한 두 가지 중요한 알고리즘 설계 패러다임이다.
두 기법 모두 모든 가능한 해결책을 체계적으로 탐색하지만, 그 접근 방식과 최적화 전략에는 중요한 차이가 있다.
백트래킹과 분기한정법은 조합 최적화 문제를 해결하기 위한 강력한 도구이다.
백트래킹은 제약 충족 문제에 더 적합하며, 가능한 모든 해결책이나 첫 번째 유효한 해결책을 찾는 데 중점을 둔다. 반면 분기한정법은 최적화 문제에 더 적합하며, 경계값을 사용하여 최적해를 효율적으로 찾는 데 중점을 둔다.
...