K-d Tree
K-d Tree는 k차원 공간에서 점들을 효율적으로 저장하고 검색하기 위한 이진 트리 기반의 공간 분할 데이터 구조로, K-d Tree는 k차원 공간을 재귀적으로 분할하여 표현하는 이진 트리이다.
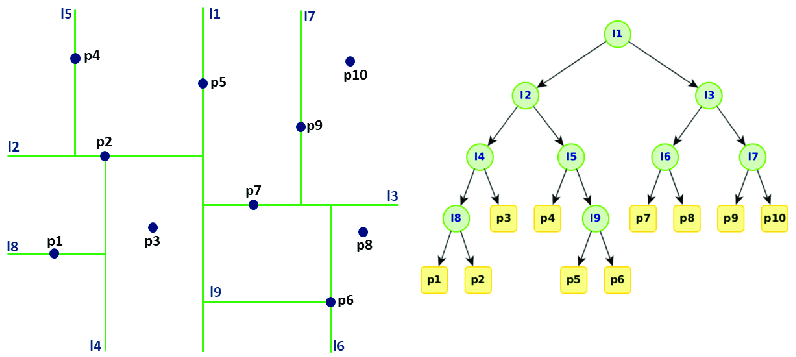
각 노드는 k차원 공간의 한 점을 나타내며, 비단말 노드는 해당 차원을 기준으로 공간을 두 개의 하위 공간으로 분할한다.
특징
- 다차원 데이터 처리: k차원 공간의 점들을 효율적으로 저장하고 검색할 수 있다.
- 계층적 구조: 공간을 재귀적으로 분할하여 계층적으로 표현한다.
- 차원 순환: 트리의 각 레벨마다 분할 기준이 되는 차원이 순환된다.
- 균형 구조: 중앙값을 기준으로 분할하여 균형 잡힌 트리를 구성한다.
장점
- 효율적인 검색: 다차원 공간에서의 근접 이웃 검색이나 범위 검색을 빠르게 수행할 수 있다.
- 차원 축소: 문제의 차원을 줄여 검색 시간을 단축하고 메모리 사용을 줄일 수 있다.
- 다양한 응용: 데이터 마이닝, 컴퓨터 그래픽스, 과학 계산 등 다양한 분야에 활용된다.
단점
- 고차원 데이터의 한계: 차원이 증가할수록 성능이 저하될 수 있다.
- 불균형 가능성: 데이터 분포에 따라 트리가 불균형해질 수 있다.
- 동적 데이터 처리의 어려움: 데이터 삽입/삭제 시 트리 재구성이 필요할 수 있다.
응용
- 최근접 이웃 검색: 머신러닝의 k-최근접 이웃(k-NN) 알고리즘에 활용된다.
- 범위 검색: 지리 정보 시스템(GIS)에서 특정 영역 내 객체 검색에 사용된다.
- 컴퓨터 비전: 이미지 처리와 특징점 매칭에 활용된다.
- 충돌 감지: 게임이나 시뮬레이션에서 객체 간 충돌 감지에 사용된다.
동작 원리
트리 구축:
- 각 레벨에서 분할 축(차원)을 선택한다.
- 선택된 축을 기준으로 데이터의 중앙값을 찾는다.
- 중앙값을 기준으로 데이터를 좌우 하위 트리로 분할한다.
- 이 과정을 재귀적으로 반복하여 트리를 구축한다.
검색:
- 루트 노드부터 시작하여 검색 대상과 노드의 값을 비교한다.
- 현재 레벨의 분할 축을 기준으로 좌우 서브트리 중 하나를 선택하여 탐색을 계속한다.
- 리프 노드에 도달하거나 조건을 만족하는 노드를 찾을 때까지 이 과정을 반복한다.
구성 요소
- 노드: 각 노드는 k차원 점과 분할 축 정보를 저장한다.
- 분할 축: 각 레벨에서 공간을 분할하는 기준이 되는 차원을 나타낸다.
- 좌우 자식 노드: 분할된 하위 공간을 나타내는 노드들이다.
구현 방식
다음은 Python을 사용한 K-d Tree의 기본 구현 예시:
| |
이 구현은 K-d Tree의 기본 구조와 최근접 이웃 검색 기능을 보여줍니다. 실제 응용에서는 더 복잡한 기능과 최적화가 필요할 수 있다.